[TOC]
噪声去除
由于边缘检测很容易受到噪声影响,所以第一步是使用 5x5 的高斯滤波器去除噪声。
用到的函数:cv2.GaussianBlur()
参数:
- src: 源图像
- ksize: 卷积框
- sigmaX:表现在高斯曲线上就是曲线越高越尖,表现在滤波效果上就是模糊程度小
- sigmaY:表现在高斯曲线上就是曲线越矮越平缓,表现在滤波效果上就是模糊程度大
cv2.GaussianBlur(img, (5, 5), 70, 70)
计算图像梯度
对平滑后的图像使用 Sobel 算子计算水平方向和竖直方向的一阶导数(图
像梯度)(Gx 和 Gy)。根据得到的这两幅梯度图(Gx 和 Gy)找到边界的梯
度和方向,公式如下:
$$ Edge Gradient(G) = \sqrt(G_x^2 + G_y^2) $$
$$ Angle(\theta) = tan^{-1} (\frac{G_x}{G_y} ) $$
($G_x, G_y$) 梯度的方向一般总是与边界垂直。梯度方向被归为四类:垂直,水平,和 两个对角线。
非极大值抑制
在获得梯度的方向和大小之后,应该对整幅图像做一个扫描,去除那些非边界上的点。对每一个像素进行检查,看这个的梯度是不是周围具有相同梯度方向的点中最大的。

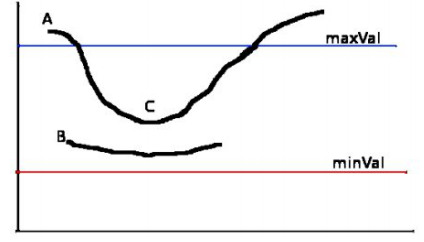
滞后阈值
现在要确定那些边界才是真正的边界。这时我们需要设置两个阈值:minVal 和 maxVal。当图像的灰度梯度高于 maxVal时被认为是真的边界,那些低于 minVal 的边界会被抛弃。如果介于两者之间的话,就要看这个点是否与某个被确定为真正的边界点相连,如果是就认为它也是边界点,如果不是就抛弃。
OpenCV中的Canny算法
在 OpenCV 中只需要一个函数:cv2.Canny(),就可以完成以上几步。让我们看如何使用这个函数。这个函数的第一个参数是输入图像。第二和第三个分别是 minVal 和 maxVal。第三个参数设置用来计算图像梯度的 Sobel卷积核的大小,默认值为 3。最后一个参数是 L2gradient,它可以用来设定求梯度大小的方程。如果设为 True,就会使用我们上面提到过的方程,否则使用方程:
$$ Edege Gradient(G) = |G_x^2| + |G_y^2| $$
代替,默认值为 False。
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread("../imgs/test.jpeg")
cv2.namedWindow('image')
def do_nothing(x):
pass
cv2.createTrackbar('minVal', 'image', 0, 500, do_nothing)
cv2.createTrackbar('maxVal', 'image', 0, 500, do_nothing)
while 1:
minVal = cv2.getTrackbarPos('minVal', 'image')
maxVal = cv2.getTrackbarPos('maxVal', 'image')
if minVal > maxVal:
cv2.setTrackbarPos('minVal', 'image', maxVal)
dst = cv2.Canny(img, minVal, maxVal)
cv2.imshow('image', dst)
if cv2.waitKey(5) == ord('q'):
break
cv2.destroyAllWindows()
原图:

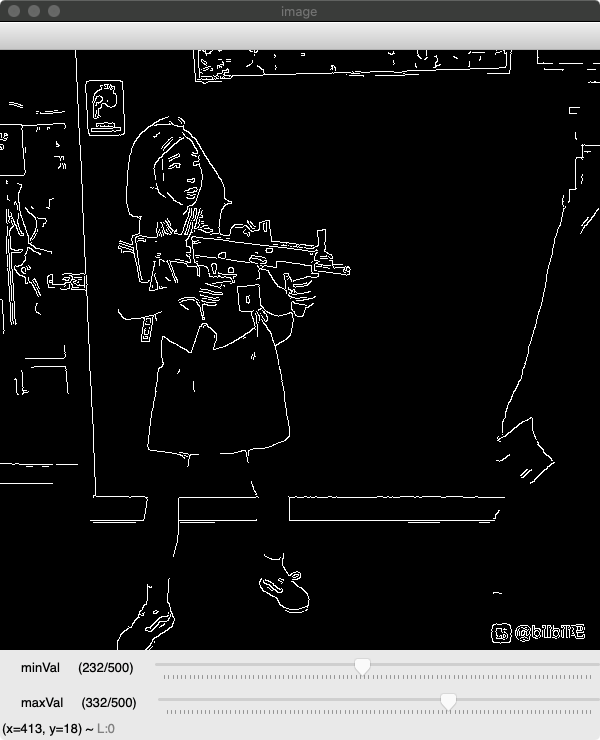
结果:(可以通过调节滑动条来设置阈值 minVal 和 maxVal 进而来进行 Canny 边界检测。)